Gearbox
Содержание:
Step 7: Available Gearboxes

This next section provides a list of commonly used gearboxes that are compatible with common motors.
| Motor Name | Compatible Gearboxes |
|
RS-500 Series: AndyMark 9015 Fisher Price BaneBots RS-550 |
Banebots RS-500 PlanetaryAndyMark CIM-SimAndyMark 3 Stage ToughboxAndyMark PlanetaryAndyMark Double Doozy Planetary |
| BaneBots RS-775 | BaneBots RS-700 PlanetaryAndyMark PG71 Planetary |
| CIM | AndyMark ToughboxAndyMark Toughbox MiniAndyMark Toughbox NanoAndyMark 3 Stage ToughboxAndyMark CIMple BoxAndyMark ShifterAndyMark Super Shifter |
Photo Credit: http://www.andymark.com/product-p/am-0114.htm
6 Speed
ZF 6HP — 09L / 0AT / 0B6 / 0BQ / 09E
These gearboxes belong to the category of conventional multi-step automatic gearboxes having a torque converter. They are based on the same design and functional features, and derive from the gearbox line of systems supplier ZFGetriebe GmbH.
They have the following features in common:
Torque converter with lockup clutch
Lepelletier planetary gearset concept (for 6 forward gears and 1 reverse gear using only 5 shift devices)
Electro-hydraulic control by means of mechatronics integrated in the gearbox
Ratio spread and gear ratio steps
Dynamic Shift Program (DSP) – tiptronic function and sport program
6HP-26 A61 / AL600-6Q / 09E
Longitudinally mounted gearbox and four-wheel drive, integrated centre differential and front axle drive on the upstream side of the torque converter.
Self-locking centre differential with dynamic torque split (in a basic ratio of 50/50 or 40/60 dependent on version).
Rated torque holding of 700 Nm
Initially, the 09E gearbox was exclusively designed for use on the Audi A8 (4E D3). A revised version of the gearbox was later used on the Audi S6 and Audi RS6 (C6) too.
6HP-19A / AL420-6Q / 09L
Longitudinally mounted gearbox and four-wheel drive, integrated centre differential and front axle drive.
Self-locking centre differential with dynamic torque split (in a basic ratio of 50/50 or 40/60 dependent on version).
Rated torque holding of 500 Nm
The 09L gearbox was first used on the Audi A6 (4F C6) and is fitted to the Audi A4 (B6, B7), Audi A6 (C6) and Audi A8 (D3).
6HP-19X / AL420-6A / 0AT
Longitudinally mounted gearbox and transfer case combination
Rated torque holding of 360 Nm
The 0AT gearbox is used exclusively on the Audi Q7 (4L) with 3.6 FSI engine.
6HP-28AF / AL651-6Q / 0B6
Longitudinally mounted gearbox and four-wheel drive, integrated centre differential and front.
The axle drive is on the upstream side of the torque converter
Self-locking centre differential with 40/60 front-to-rear asymmetric-dynamic torque split
Rated torque holding of 700 Nm
The 0B6 gearbox is used on the B8 Series Audi A4 (8K), A5 (8T) and the US-spec Audi Q5.
6HP-32X / AL950-6A / 0BQ
Longitudinally mounted gearbox and transfer case combination
Rated torque holding of 1000 Nm
The 0BQ gearbox is used exclusively on the Audi Q7 (4L).
AISIN TR-60SN / AL750-6Q / 09D
Longitudinally mounted gearbox and transfer case combination
It uses a fuzzy logic-controlled switching program that depend on driver and driving situations as well as switching programmes that depend on driving impedance
Rated torque holding of between 750Nm and 1000 Nm
The 09D gearbox was first used in the Touareg V6 and V10 TDI
We do not offer software for this gearbox
Step 2: Motor Characteristics (continued)
Power
A motor’s power is the rate at which the motor can do work. It is essentially a measurement of how fast a motor can get a job done. Its value in watts is given by the equation
 |
(3) |
| Symbol | Name | Units | Description |
| P | Power | Watts (W) | The amount of power supplied by the motor |
| τ | Torque | Newton Meters (N-m) | The amount of torque applied to the motor output shaft |
| ω | Speed | Rounds per Minute (rpm) | The rotational velocity of the motor’s output shaft |
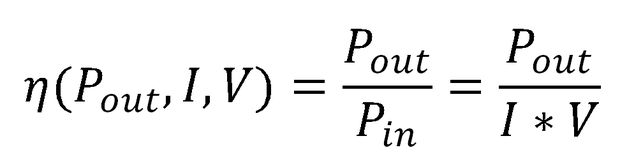
Efficiency
Motor efficiency is a measurement of how much of the electrical energy put into a motor is converted to mechanical energy. Much of the remaining energy is converted into heat, which can cause a motor to burn out if it is operated at a torque/rpm where its efficiency is very low. Efficiency is given by the equation
 |
(4) |
| Symbol | Name | Units | Description |
| η | Efficiency | Percentage (%) | The percentage of electrical energy input into the motor that is converted to useful mechanical energy |
| Pout | Power Output | Watts (W) | The motor’s output power at a given torque and speed |
| Pin | Power Input | Watts (W) | The amount of electrical power supplied to the motor |
| I | Current | Amps (A) | The amount of current drawn by the motor |
| V | Voltage | Volts (V) | The voltage at which the motor operates |
Photo Credit: http://www.engin.umich.edu/group/ctm/examples/motor/motor.html
Принцип работы гирбокса
При нажатии на спусковой ключок, замыкается контактная группа и на двигатель поступает ток от аккумулятора.
Двигатель вращает редуктор, который взводит «боевую» пружину и одновременно с этим, посредством тяги, называемой тапет отводит в «заднее» положение нозл, позволяя одному шарику из магазина попасть в ствол привода.
После того как шар подан в ствол, нозл возвращается в «переднее» положение, закрывая доступ в ствол другим шарам и одновременно обеспечивая герметичность системы, за счет плотного контакта с резинкой Хоп-Апа.
Тем временем, под действием редуктора, связка пружина-поршень достигает крайнего положения, освобождается от зацепления с секторной шестерней и начинает обратное движение, под действием накопленной пружиной энергии.
В процессе движения, поршеня по цилиндру, в корпусе цилиндра создается повышенное давление, которое в свою очередь, выталкивает шарик из ствола привода.
Step 1: Motor Characteristics
There are several important characteristics of motors that provide information about a motor and its capabilities. They are the motor’s output torque, its current draw, its output speed, its power, and its efficiency, each of which I will discuss in turn. These characteristics are interdependent and can all be derived from four values: the motor’s stall torque, stall current, free current, and free speed.
Torque
A motor’s output torque is the amount of force with which its output shaft can rotate. If too much torque is applied to a motor, its output shaft will stall, or stop turning. Other motor characteristics are commonly written as a function of torque. It is usually measured in N-m when metric units are required and oz-in when English units are required.
Current Draw
The motor’s current draw is the amount of electrical current the motor draws at any given load. As the load on the motor (the torque) increases, the amount of current that the motor draws increases linearly. This relationship can be written as
| (1) |
| Symbol | Name | Units | Description |
| I | Current | Amps (A) | The amount of current drawn by the motor |
| Istall | Stall current | Amps (A) | The amount of current drawn when the motor is stalled |
| Ifree | Free Current | Amps (A) | The amount of current drawn when the motor has no load placed upon it |
| τstall | Stall Torque | Newton Meters (N-m) | The amount of torque required to stall the motor |
| τ | Torque | Newton Meters (N-m) | The amount of torque applied to the motor output shaft |
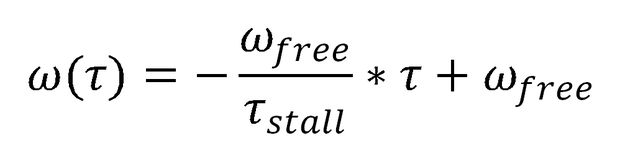
Speed
The motor’s output speed is the rotational velocity at which the output shaft spins. As the load on the motor increases, the output speed decreases linearly. This relationship can be written as
 |
(2) |
| Symbol | Name | Units | Description |
| ω | Speed | Rounds per Minute (rpm) | The rotational velocity of the motor’s output shaft |
| ωfree | Free Speed | Rounds per Minute (rpm) | The speed at which the motor spins when it has no load place upon it |
| τstall | Stall Torque | Newton Meters (N-m) | The amount of torque required to stall the motor, or prevent its output shaft from rotating |
| τ | Torque | Newton Meters (N-m) | The amount of torque applied to the motor output shaft |
Photo Credit: http://www.engin.umich.edu/group/ctm/examples/motor/motor.html
История компании
Gearbox Software была основана в январе 1999 года пятью членами команды из закрывшейся тогда студии Rebel Boat Rocker: Рэнди Питчфордом, Стивеном Балом, Лэндоном Монтгомери, Брайаном Мартелом и Робом Хейронимусом. Перед работой в RBR, Питчфорд и Мартел работали в 3D Realms, а Монтгомери — в Bethesda Softworks.
Первой игрой компании стало официальное дополнение для шутера от первого лица Half-Life — Half-Life: Opposing Force, созданное по заказу компании Valve. Игра предлагает самостоятельный сюжет, дополняющий и расширяющий вселенную игр Half-Life. Главным героем является капрал Адриан Шепард, который был послан в исследовательский центр «Чёрная Меза» для уничтожения всех следов неудавшегося эксперимента. Таким образом, игроки получают возможность увидеть события оригинальной игры от лица иного персонажа.
Следующая игра, Half-Life: Blue Shift, была выпущена (так же, как и Opposing Force) в виде официального дополнения. Сюжет рассказывает историю охранника комплекса «Чёрная Меза» Барни Калхауна. Вместе с игрой поставляется дополнение Half-Life High Definition Pack, улучшающее графическую часть в оригинальной игре и её первом дополнении. В 2001 году на PlayStation 2 было выпущено третье дополнение — Half-Life: Decay, вместе с портированной версией оригинальной Half-Life.
Спустя год, в 2002 году для персонального компьютера выпущена игра James Bond 007: Nightfire в жанре шпионского боевика.
Также компания Gearbox Software принимала участие в работе над коммерческой версией Counter-Strike и Counter-Strike: Condition Zero, которая была создана совместно с несколькими другими студиями. Для моделирования оружия один из художников Gearbox принёс в офис автомат, чтобы использовать его как источник для вдохновения. Работник банка, располагающегося в том же здании, что и офис Gearbox, заметил художника, поднимающегося на лифте (с автоматом под плащом) и сообщил в полицию. Вскоре в офис приехал отряд SWAT, и этаж за этажом прочёсывал всё здание в поисках «террориста», пока наконец не стало ясно, что произошла ошибка.
В 2005 году вышла первая игра серии Brothers in Arms, сюжет которой рассказывает о событиях произошедших во времена Второй мировой войны. Всего разработано три основных игры, последняя из которых — Brothers in Arms: Hell’s Highway (), а также несколько отдельных проектов для консолей.
В январе 2013 года Gearbox Software выкупила у обанкротившейся THQ бренд Homeworld, объявив о планах по его развитию. В 2015 году компания выпустила переиздание оригинальных частей серии игр под названием Homeworld Remastered Collection — комплект включает Homeworld и Homeworld 2 с переработанной графикой и адаптированные для современных ПК (кроме того, в комплекте доступны и адаптированные к современным ПК оригинальные игры, без переработанной графической составляющей). В 2016 году был выпущен приквел Homeworld: Deserts of Kharak, описывающий события на планете Кхарак до начала событий первой игры.
Разработанные игры
- 1999 – Half-Life: Opposing Force (PC)
- 1999 – Half-Life (порт на Dreamcast, разработка прекращена)
- 2000 – Counter-Strike (PC).
- 2000 – Half-Life: Blue Shift (PC).
- 2001 – Half-Life (порт на PlayStation 2).
- 2001 – Half-Life: Decay (PlayStation 2, официальная версия для PC была отменена).
- 2002 – Tony Hawk’s Pro Skater 3 (PC).
- 2002 – James Bond 007: Nightfire (PC).
- 2003 – Halo: Combat Evolved (порт на PC и Mac).
- 2004 – Counter-Strike: Condition Zero (совместная разработка) (PC).
- 2004 – Halo: Custom Edition (PC).
- 2005 – Brothers In Arms: Road to Hill 30 (PC, XBox, PlayStation 2).
- 2005 – Brothers in Arms: Earned in Blood (PC, XBox, PlayStation 2).
- 2006 – Brothers In Arms D-Day (PSP).
- 2008 – Brothers in Arms: Hell’s Highway (PC, XBox360, PlayStation 3).
- 2009 – Borderlands (PC, XBox360, PlayStantiom 3).
- 2011 – Duke Nukem Forever (PC, XBox360, PlayStation 3).
- 2011 – Aliens Infestaion (3DS).
- 2012 – Borderlands 2 (PC, XBox360, PlayStation 3).
- 2013 – Aliens: Colonial Marines (PC, XBox360, PlayStation 3, Wii U).
- 2015 – Homeworld Remastered Collection (PC).
- 2016 – Battleborn (PC, XBox One, PlayStation 4).
- 2019 – Borderlands 3 (PC, XBox One, PlayStation 4).
- В разработке – Project 1v1 (кодовое название).
- Поддержка Borderlands 3 временными событиями, патчами, хот-фиксами и различными дополнениями.
Step 4: Choosing a Motor and Gear Ratio
Now that you understand the specifications that distinguish motors, you can work on choosing a motor and gear ratio for your application. Which motor is most appropriate for a given job is entirely dependent on the application’s requirements. This means that you must determine end results such as how big of a load are you moving and how fast do you want it to move, and then translate these into requirements such as output torque and speed.
Start by looking at the specifications of the available motors. The Motor Spec Sheet for the 2012 FRC season is included on this page. There are many factors to consider when choosing a motor and gear ratio, including:
- How gearing will affect the motor’s output torque and speed. Usually, gears will be used to decrease speed and increase torque.
- Inefficiency in power transmission – each stage of gearing or chain run is approximately 90% efficient.
- Differences between theoretical and actual performance. Because theoretical performance is usually better than actual performance, even after accounting for inefficiency, it is important to choose motors and gear ratios with a healthy safety factor. That is, make sure that they will be able to handle more than the expected load at a faster than required speed.
- The amount of current that a single motor can draw is limited by the circuit breakers on the power distribution board. When using 40 amp breaker, your current draw is limited to a maximum of 40 amps, meaning you should design the motors to draw less than 40 amps under the expected load. In addition, the robot can draw a maximum of 120 amps at a time, as limited by the main circuit breaker.
- Running motors at or near stall load, the maximum amount of torque they can output, will cause them to burn up because much of the energy supplied to the motor will be turned into heat. The amount of heat that a motor can handle is directly related to its total mass. For this reason, heavy motors like CIMs are much less likely to burn out than smaller ones like the Fisher Price motors.
- If no single motor will fulfill your requirements, consider pairing motors. When combining two motors, the output torque and current draw are additive, while the output speed does not change. If two different motors are matched together, their free speeds must be matched through a gear reduction. For example, combining a Fisher Price and CIM motor would require an extra 3:1 gear reduction for the Fisher Price motor because its output speed is approximately 3 times faster than a CIM’s. If the output speeds are not matched, it will cause added resistance in the gearbox and negate any benefits of having multiple motors.
By accounting for all of these factors in your calculations when choosing a motor and gear ratio, you will ensure that your robot works as you intend the first time around. The example problem at the end of this tutorial will demonstrate how to go through the process of making these calculations.
Step 8: Using What You Learned
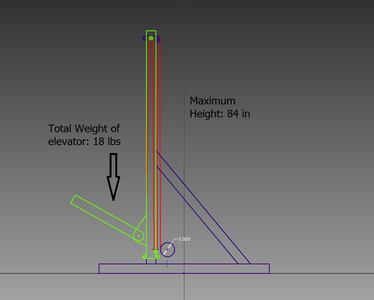
Now I will work through an example problem to demonstrate how to go through the process of designing a gearbox. The drawing above shows a picture of a two stage elevator, an element of a manipulator commonly found in FRC. The challenge is to design a gearbox that is capable of driving the 3 inch diameter winch and lifting the elevator to its maximum height of 84 inches high in a time of 1.5 seconds. For the purpose of the problem, we will make two major simplifications: first, we will assume that the 18 pound load is applied for the entirety of the elevator’s travel, when in reality the winch must lift the weight of the first stage for only half of the distance. Second, we will ignore acceleration and deceleration time, as these calculations are beyond the scope of this tutorial.
First we will convert all units to metric because metric units are much easier to work with.


Next we must turn our end goals into requirements that can be used to choose a motor and gear ratio.
Calculating the required rotational velocity of the winch:
Number of rotations to raise elevator: 
Calculating the load on the winch:
Step 9: Using What You Learned (continued)
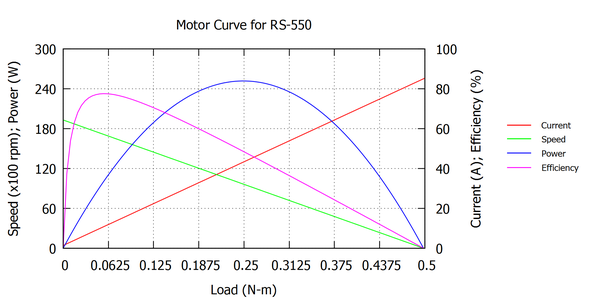
Now we must choose a motor and gear ratio. We’ll start by looking at the specifications of the available motors and make a guess about which motor may work well for the job. We’ll try using a single BaneBots RS-550 as our starting point because of its high power, meaning it will be able to get the job done faster. In addition, it is commonly used in applications such as this, meaning that it is probably a good fit for the job in general. To make estimations easier, I made a motor curve graph for the RS-550.
First, we want to make sure that the motor won’t draw more than 40 A and blow a circuit breaker. Looking at the graph, we can visually see that it takes a load of .23 Nm for the RS-550 to draw 40 A. To ensure that the motor won’t reach this, even under heavy load, we will try designing for a current draw of 20 A. Looking at the graph again, we see that this corresponds to a torque of .115 Nm. Now, we can calculate the reduction we would need to achieve the necessary torque of 3.05 Nm.
Gear Reduction: 
We have now chosen a gear reduction of 26:1, which means we can calculate the exact load our elevator motor should encounter.
Load at Motor: 
Now, we can use equation (1) from “Motor Characteristics” to calculate the current we would expect the RS-550 to draw at this load:
Current Draw: 
Our estimated current draw, 21.0 A, is well within our acceptable bound of 40 A. Next, we will determine the rotational velocity of the gearbox output shaft using equation (2). We will account for the 75% gearbox efficiency at this stage in the calculations.
Motor Speed: 
Now we can check to see if our chosen gear ratio will allow us to achieve our desired output speed, 357rpm.
Gearbox Speed: 
Finally, now that we have verified that our gear ratio satisfies our requirement, we can calculate how long it should take for the motor to raise the elevator.
Lift Time: 
We have now completely verified that our RS-550 motor and 26:1 gearbox will achieve or exceed our original goals. Because real world performance is often worse than the theoretical performance, it is wise to “overdesign” these systems. Doing so also ensures that our simplifications do not cause our system to perform much worse than expected.
When you first go through this process, you may have to go through the calculations multiple times as you try different motors and gear ratios. As you gain experience, you will gain an intuition of which motors and ratios will work well for a job.
The final step in this process is to choose a gearbox. In this example, choosing the RS-550 version of Banebot’s P60 gearbox with a 26:1 reduction makes a lot of sense. Not only is it compatible with our motor, but it also has the right gear reduction and a common .5 inch keyed output shaft.
Hopefully this example problem has helped you understand the process of choosing a motor and gearbox. In addition, I hope that it has shown you how to properly apply the theory you learned earlier in this tutorial.
Tales from the Borderlands
Telltale Games и Gearbox Software уже работали вместе над разработкой Железяки в игре Poker Night 2. Концепт-арт игры впервые был показан на Spike Video Game Awards в 2012 году. После церемонии Telltale и Gearbox начали исследовать свои возможности. Вселенная Borderlands имеет большое количество персонажей с интересными историями. Telltale, в свою очередь, продолжает развивать полюбившихся игрокам персонажей.
Разработчики также пообещали, что в игре будет значительно больше юмора, чем в двух предыдущих проектах от Telltale Games — The Walking Dead: The Game и The Wolf Among Us и, что эпизоды будут выходить каждые 5-8 недель.
Актёры, озвучившие персонажей в предыдущей игре, вернутся и продолжат свою работу, включая Дэймона Кларка (Красавчик Джек). Трой Бэйкер и Лаура Бэйли будут озвучивать двух протагонистов игры (Риза и Фиону). В озвучке персонажей также примут участие Патрик Уорбертон (Васкес), Крис Хардвик (Вон), Нолан Норт (Август) и Эрин Иветт (Саша). В игре появятся персонажи предыдущих игр серии такие, как Афина, Зер0, Маркус Кинкейд, Мокси, братья Реднек, Брик и др. Двух новых персонажей игры — Финча и Крогера — озвучат Дэйв Фенной и Адам Харрингтон. Они же озвучивали главных протагонистов двух предыдущих проектов Telltale Games (The Walking Dead, The Wolf Among Us).
8 декабря 2013 года на Spike Video Game Awards (VGX) 2013 разработчики анонсировали игру.
14 ноября 2014 года вышел первый трейлер игры, в котором показаны некоторые сцены из первого эпизода.
Borderlands
Описание
Оружие Gearbox не выделяется какими-либо особыми параметрами и бонусами, но обладает, конечно же, непривычным логотипом производителя на карточке оружия и уникальными материалами: низшее по качеству оружие имеет бело-зеленую расцветку, среднее – розово-желтую, а самое лучшее – оранжево-желтую.
Получение
- За предзаказ игры:
- для Брика – RF-BIA Рецидивист и SG10-XX Злой Дробовик;
- для Лилит – TK4-BIA Дрянной Рецидивист и TD22-OP4 Relentless SMG;
- для Мордекая – BLR4-BIA Жестокий Спецназовец и LB30-BIA Зловещий Гром;
- для Роланда – BLR-BIA Дрянной Рецидивист и CR30-BIA Убойный Гопник.
- Всадник – уникальная снайперская винтовка, которую можно получить только во время выполнения задания Еще одна часть головоломки в .
- За выполнение побочных заданий в локации Circle of Duty в дополнении The Secret Armory of General Knoxx:
- Долговой круг: Рядовой – пистолет.
-
Долговой круг: Медаль за отвагу – оружие, соответствующее классу персонажа:
- для Брика – ракетомет;
- для Лилит – пистолет-пулемет;
- для Мордекая – снайперская винтовка;
- для Роланда – штурмовая винтовка.
Borderlands GOTY Enhanced
В Borderlands GOTY Enhanced оружие Gearbox выдают на старте тем, у кого есть копия оригинальной игры.
- Террор — револьвер с разрывными патронами.
- Запрещённый прием — пистолет с лезвием, который наносит 500% урона в ближнем бою.
- Тихая Ночь — снайперская винтовка, имеющая критический урон в 800%.
- Мордоворот — штурмовая винтовка, имеет высокую точность в режиме прицеливания.
- Крутой Бластер Т.К. Бахи — дробовик с лезвием, имеет высокую точность, наносит 150% урона в ближнем бою.
- Коллективный Разум — ракетомет, стреляет очередью из 3 ракет.
Borderlands 2
Описание
Оружие с префиксом «Gearbox» и уникальными материалами – желтый глянцевый окрас с черными элементами и логотипом студии, входит в комплект Borderlands 2 Premiere Club Pack: игрок его получает во время начала игры с новым персонажем, где оно оказывается в инвентаре вместе с Реликвией Искателя Хранилища. В комплект оружия входят:
- Снайперская винтовка от Джейкобс – Gearbox чинук, Gearbox товарищ, Gearbox пожиратель или Gearbox карабин.
- Штурмовая винтовка от Владоф – Gearbox винтарь или Gearbox ренегат.
- Пистолет-пулемет Gearbox преобразователь траекторий от Гиперион.
Галерея
Gearbox пожиратель
Gearbox чинук
Gearbox карабин
Gearbox винтарь
Gearbox преобразователь траекторий
Добавить фото в галерею
Accessories
Some of the accessories that may be driven include:
Fuel pump
- There may be a number of fuel pumps: low pressure, high pressure, afterburner pump and also a speed-sensitive governor
- Generators, often one for engine systems and one for the aircraft
- Constant Speed Drive to maintain a constant frequency AC generator
- Lubricating oil pumps
- Hydraulic pump
- High-pressure air compressor (undercarriage actuation, etc.)
- Low-pressure air compressor (cabin air conditioning), where this is not provided by tapping engine compressor bleed air.
- Engine starter
- Tachometer sensor drives
- Auxiliary gearbox drive, to a further gearbox that may be required in some installations.
Additional facilities are provided for a centrifugal oil breather, to separate the drive lubricating oil from the overboard breather air vent. Also access for hand-turning the engine, during ground maintenance.
Пожалуйста, помогите c переводом:
It slides comfortably into the ‘affordable’ bracket though, considering its supersized display, and when it lands on contract (which should be soon) it won’t carry hefty monthly fees.
Английский-Русский
Measuring the positive side of the work–family interface: Development and validation of a work–family enrichment scale
Английский-Русский
Policy – Forestry Commission England continues to
take the lead on grey squirrel policy on behalf of Defra.
Английский-Русский
1. The ENIAC (1943-1946) The first all-electronic computer, the Electronic Numerical Integrator and Calculator (ENIAC) was developed at the Moore School of Electrical Engineering of the University of Pennsylvania. It was developed as a result of a military need. J.Presper Eckert and John Mauchly proposed the machine to solve the problem of calculating firing tables for new weapons. The ENIAC weigh
Английский-Русский
7 Speed
DQ200 — 0AM / 0CW
At the start of 2008, another world-first 70 kg seven-speed DSG transaxle became available. It differs from the six-speed DSG, in that it uses two single-plate dry clutches (of similar diameter) designed by LuK Clutch Systems.
This seven-speed DSG is used in smaller front-wheel-drive cars with smaller-displacement engines with lower torque outputs, such as the latest Volkswagen Golf, Volkswagen Polo Mk5,and the new SEAT Ibiza. It is also fitted to the Caddy 1.6 TDI models. It has been paired to engines with up to 250 Nm (180 lb/ft). It has considerably less oil capacity than the six-speed DQ250, the DQ200 uses just 1.7 litres of transmission fluid.
Unfortunately we are not able to tune these for more torque holding due to their ‘dry clutch’ design.
DQ380 — 0DE
Mainly used in the Golf 7 GTI China. This gearbox is a smaller version of the DQ500, which can be found on the Audi RS3/TT-RS.
DQ381 — 0GC
In 2017 an improvement of DQ380 was derived as the DQ381 and is used in many new vehicles with MQB platform like the Arteon. DQ381 has a all wheel drive variant as DQ381-7A, the front drive variant is called DQ381-7F.
This gearbox is a smaller version of the DQ500, which can be found on the Audi RS3/TT-RS.
With modified software the DQ380 can handle up to 600hp/700Nm.
DQ500 — 0BH / 0BT
This is a heavier transverse 7 speed DSG and is built to support up to 600 Nm (440 lb/ft) from the factory. It can be found in the VW Transporter, Tiguan, Audi RS3, TT-RS and Q3. The DQ500 gearbox is the strongest transverse DSG within the VAG group. Therefore, this one is used on heavier vehicles and models with high power / torque outputs.
The DQ500 can handle up to 800hp/1000Nm with DSG software and upgraded clutch packs.
DQ511
Codenamed DQ511, the new DSG gearbox with 10 speeds is mechanically similar to the DQ500. Besides improving fuel consumption, the extra gears offer one major advantage. The gearbox feels more open, in that the difference between the highest and the lowest ratio is wide. Because they are closer in drive ratio, there’s less jumpiness when shifting, which some owners have complained about in the past.
Just like the DQ500, the two multi-plate clutches are bathed in oil, though the lubricant reaches a lower level and has reduced viscosity, which improves efficiency.
The DQ511 project was confirmed as being dropped by VW in early 2019, with them stating that their focus was on electric vehicles, which generally require no gearboxes or much simpler ones, due to their instant torque.
DL382 — 0CK / 0DN / 0CL / 0DP & DL382+ — 0HL
7-speed DSG transmission with wet clutch. Used in the Audi A4/A5/A6/Q5 and Volkswagen Phideon (Chinese market model). Production started in 2015 with a 400Nm capacity, both front wheel drive variant DL382-7F and all wheel drive variant DL382-7Q. The Quattro Ultra all wheel drive version DL382-7A was introduced in the Q5 (type FY). Starting with Audi A6/A7 (type 4K), the high torque variant (up to 500Nm) named as DL382+ was introduced. 0CK and 0DN are codenames for DL382-7F, 0CL is for DL382-7Q, 0CJ and 0DP are for DL382-7A and 0HL is for DL382+-7A.
DL501 — 0B5
In late 2008, an all-new seven-speed longitudinal S-Tronic version of the DSG transaxle went into series production. Initially, from early 2009, it is only used in certain Audi cars, and only with longitudinally mounted engines. Like the original six-speed DSG, it features a concentric dual wet multi-plate clutch. However, this particular variant uses notably more plates — the larger outer clutch (for the odd-numbered gears) uses 10 plates, whereas the smaller inner clutch (driving even-numbered gears and reverse) uses 12 plates.
Another notable change over the original transverse DSGs is the lubrication system, Audi now utilise two totally separate oil circuits. One oil circuit, consisting of 7.5 litres, lubricates the hydraulic clutches and mechatronics with fully synthetic specialist automatic transmission fluid (ATF), whilst the other oil circuit lubricates the gear trains and front and centre differentials with 4.3 litres of conventional hypoid gear oil. This dual circuit lubrication is aimed at increasing overall reliability, due to eliminating cross-contamination of debris and wear particles.
It has a total mass, including all lubricants and the dual-mass flywheel of 141.5 kg.
The factory rate the torque handling limit of up to 600 Nm (440 lb/ft), and engine power outputs of up to 330 kW (450 PS; 440 bhp), but up to 1000 Nm has been put through these without issue.