Прямоточный воздушно-реактивный двигатель
Содержание:
Тяга ПВРД
Сила тяги ПВРД определяется выражением
P=dmadt⋅(ve−v)+dmfdt⋅ve{\displaystyle P={\frac {dm_{a}}{dt}}\cdot (v_{e}-v)+{\frac {dm_{f}}{dt}}\cdot v_{e}}(3)
Где P{\displaystyle P} — сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
Секундный расход воздуха:
- dmadt=ρ⋅dVdt=ρ⋅S⋅dldt=ρ⋅S⋅v{\displaystyle {\frac {dm_{a}}{dt}}=\rho \cdot {\frac {dV}{dt}}=\rho \cdot S\cdot {\frac {dl}{dt}}=\rho \cdot S\cdot v},
где
- ρ{\displaystyle \rho } — плотность воздуха (зависит от высоты),
- dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
- S{\displaystyle S} — площадь сечения входа воздухозаборника,
- v{\displaystyle v} — скорость полёта.
Секундный расход массы рабочего тела для идеального случая, когда горючее полностью сгорает и полностью используется кислород воздуха в процессе горения, вычисляется с помощью стехиометрического коэффициента:
- dmdt=dmadt+dmfdt=dmadt+1L⋅dmadt=dmadt⋅(1+1L){\displaystyle {\frac {dm}{dt}}={\frac {dm_{a}}{dt}}+{\frac {dm_{f}}{dt}}={\frac {dm_{a}}{dt}}+{\frac {1}{L}}\cdot {\frac {dm_{a}}{dt}}={\frac {dm_{a}}{dt}}\cdot (1+{\frac {1}{L}})},
где
- dmadt{\displaystyle {\frac {dm_{a}}{dt}}} — секундный расход воздуха,
- dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего,
- L{\displaystyle L} — стехиометрический коэффициент смеси горючего и воздуха.
Планеты живые и мертвые
Работа в Лаборатории реактивного движения предоставляла Лавлоку прекрасную возможность получать первые свидетельства о природе Марса и Венеры, передаваемые космическими зондами. И это были, несомненно, совершенно мертвые планеты, разительно отличавшиеся от нашего цветущего и живого мира.
Земля обладает атмосферой, которая нестабильна в термодинамическом смысле. Газы, такие как кислород, метан и двуокись углерода, образуются в больших количествах, но сосуществуют в стабильном динамическом равновесии.
Атмосфера Земли / wikipedia
Странная и нестабильная атмосфера, которой мы дышим, требует присутствия на поверхности Земли чего-то, что может непрерывно синтезировать огромное количество таких газов, а также одновременно удалять их из атмосферы. В то же время климат планеты довольно чувствителен к изобилию многоатомных газов, например метана и углекислого газа.
У Лавлока постепенно складывается представление о регулирующей роли подобных круговоротов веществ в природе – по аналогии с метаболическими процессами в организме животного. И в эти процессы вовлечена земная жизнь, которая, согласно теории Лавлока, не только участвует в них, но и научилась поддерживать необходимые для себя условия существования, вступив с планетой в некую форму взаимовыгодного сотрудничества.
И если поначалу все это было чистым предположением, то в 1971 году у Лавлока появилась возможность обсудить эту тему с выдающимся биологом Линн Маргулис, создательницей современной версии теории симбиогенеза и первой женой Карла Сагана.
Маргулис стала соавтором гипотезы Геи. Она высказала мысль, что связующую роль в поле взаимодействия между жизнью и планетой должны играть микроорганизмы. Как отмечал Лавлок в одном из своих интервью: «Было бы справедливо сказать, что она поместила плоть в кости моей физиологической концепции живой планеты».
Из-за новизны концепции и ее несоответствия традиционным наукам Лавлок нуждался в кратком и запоминающемся названии. Тогда-то, в 1969 году, друг и сосед ученого, физик и писатель, лауреат Нобелевской премии, а также автор романа «Повелитель мух» Уильям Голдинг предложил назвать эту идею Геей – в честь древнегреческой богини Земли.
Тяга ПВРД
Сила тяги ПВРД определяется выражением
P=dmadt⋅(ve−v)+dmfdt⋅ve{\displaystyle P={\frac {dm_{a}}{dt}}\cdot (v_{e}-v)+{\frac {dm_{f}}{dt}}\cdot v_{e}}(3)
Где P{\displaystyle P} — сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
Секундный расход воздуха:
- dmadt=ρ⋅dVdt=ρ⋅S⋅dldt=ρ⋅S⋅v{\displaystyle {\frac {dm_{a}}{dt}}=\rho \cdot {\frac {dV}{dt}}=\rho \cdot S\cdot {\frac {dl}{dt}}=\rho \cdot S\cdot v},
где
- ρ{\displaystyle \rho } — плотность воздуха (зависит от высоты),
- dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
- S{\displaystyle S} — площадь сечения входа воздухозаборника,
- v{\displaystyle v} — скорость полёта.
Секундный расход массы рабочего тела для идеального случая, когда горючее полностью сгорает и полностью используется кислород воздуха в процессе горения, вычисляется с помощью стехиометрического коэффициента:
- dmdt=dmadt+dmfdt=dmadt+1L⋅dmadt=dmadt⋅(1+1L){\displaystyle {\frac {dm}{dt}}={\frac {dm_{a}}{dt}}+{\frac {dm_{f}}{dt}}={\frac {dm_{a}}{dt}}+{\frac {1}{L}}\cdot {\frac {dm_{a}}{dt}}={\frac {dm_{a}}{dt}}\cdot (1+{\frac {1}{L}})},
где
- dmadt{\displaystyle {\frac {dm_{a}}{dt}}} — секундный расход воздуха,
- dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего,
- L{\displaystyle L} — стехиометрический коэффициент смеси горючего и воздуха.
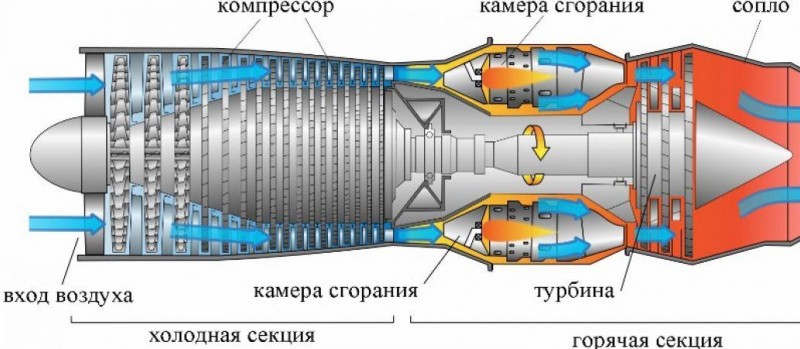
Турбовинтовой двигатель (ТВД)
Турбовинтовой двигатель. Привод винта от вала турбины осуществляется через редуктор
Устройство турбовинтового двигателя
Основная статья: Турбовинтовые двигатели
Турбовинтовые двигатели (ТВД) или турбовальные двигатели (ТВЛД)[источник не указан 390 дней] относятся к ВРД непрямой реакции.
Конструктивно ТВД схож с ТРД, в котором мощность, развиваемая последним каскадом турбины, передаётся на вал воздушного винта (обычно через редуктор). Этот двигатель не является, строго говоря, реактивным (реакция выхлопа турбины составляет не более 10 % его суммарной тяги), однако традиционно их относят к ВРД. Турбовинтовые двигатели используются в транспортной и гражданской авиации при полётах с крейсерскими скоростями 400—800 км/ч.
В ТВЛД газ, исходящий их камеры сгорания, направляется, во-первых, на турбину, приводящую в движение компрессор, а во-вторых, на турбину, связанную с приводным валом. Приводной вал механически соединяется с редуктором, приводящим в движение несущий винт. Таким образом, в ТВЛД связь ротора и выходного вала является чисто газодинамической. Такое техническое решение преимущественно применяется для силовых установок вертолетов из-за большого момента инерции несущего винта. В случае механической связи несущего винта с газогенератором запуск двигателя требует наличия стартера большой мощности.
Гиперзвуковой ПВРД
Экспериментальный гиперзвуковой летательный аппарат X-43 (рисунок художника)
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые, и скорость потока остаётся сверхзвуковой.
Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — scramjet) называется ПВРД, работающий на скоростях полёта свыше М = 5 (верхний предел точно не устанавливается).
На начало XXI века этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
История
— первый пилотируемый аппарат с маршевым ПВРД (первый полёт — 19 ноября 1946). Музей авиации и космонавтики в Ле-Бурже
В 1913 году француз получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, . Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые и , а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
Примечания
- Соболев Д. А. История самолётов. Начальный период.. — М.: РОССПЭН, 1995. — 343 с.
- Выпускавшийся серийно в Германии (1944—1945гг) ПуВРД Argus As-014 ракеты Фау-1 работал на частоте пульсаций около 45гц
- ПуВРД Argus As-014 также мог работать в этом режиме, но развиваемая им при этом тяга была слишком мала, чтобы разогнать ракету Фау-1, поэтому она стартовала с катапульты, сообщавшей ей скорость, при которой двигатель становился эффективным.
- ↑ Олег Макаров. Огненный пульс // Популярная механика. — 2017. — № 11. — С. 122-126.
- Что касается получившего широкую известность боевого применения самолёта-снаряда Фау-1, оборудованного ПуВРД, нужно отметить, что даже по меркам периода Второй мировой войны он уже не отвечал требованиям к такому оружию по скорости: более половины этих снарядов уничтожались средствами ПВО того времени, главным образом, самолётами-истребителями с поршневыми двигателями, и своим умеренным успехом Фау-1 был обязан низкому уровню развития в то время средств заблаговременного обнаружения воздушных целей.
- Рольф Вилле «Постройка летающих моделей-копий», перевод с немецкого В. Н. Пальянова, Издательство ДОСААФ СССР, Москва 1986 (Rolf Wille «Flufahige, vorbildgetrene Nachbauten», Transpress VEB Verlag fur Verkehrswessen), ББК 75.725, глава 9 «Размещение двигателя на модели» страницы 114-118
Что такое ГПВРД?
В традиционном ПВРД поступающий в воздухозаборник сверхзвуковой воздушный поток тормозится до дозвуковой скорости скачками уплотнения — ударными волнами, образуемыми за счет определенной геометрии воздухозаборника. Горючее впрыскивается в этот сжатый торможением дозвуковой поток, смесь сгорает, и горячие газы, проходя через регулируемое или нерегулируемое сопло, снова разгоняются до сверхзвуковых скоростей.
В гиперзвуковом ПВРД воздушный поток тормозится на входе в меньшей степени и остается сверхзвуковым в ходе всего процесса горения топлива. В этом случае отпадает нужда в регулируемых соплах, и работа двигателя оптимизирована для широкого диапазона чисел Маха. Современные двухрежимные гиперзвуковые ПВРД способны работать в режимах как дозвукового, так и сверхзвукового горения, обеспечивая плавный переход из одного режима в другой.
Концепция ГПВРД являет собой образец гармоничного сопряжения планера летательного аппарата и его движителя. В этой схеме двигатель занимает всю нижнюю поверхность летательного аппарата. Силовая установка состоит из семи основных элементов, пять из них относятся собственно к двигателю, а два — к фюзеляжу аппарата. Зона двигателя — это передняя и задняя части воздухозаборника, камера сгорания, сопло и система подачи горючего. К фюзеляжу можно отнести влияющие на работу двигателя нижние поверхности его носовой и хвостовой частей.
В скоростной системе нагнетания воздуха эффективно взаимодействуют носовая нижняя часть фюзеляжа и воздухозаборник. Они совместно захватывают и сжимают воздушный поток, подавая его в камеру сгорания. В отличие от обычных реактивных двигателей, в ГПВРД на сверхзвуковых и гиперзвуковых скоростях полета необходимое сжатие поступающего воздуха достигается без использования механического компрессора. Первоначальное сжатие создается нижней носовой частью фюзеляжа самолета, а воздухозаборник доводит его до необходимой степени сжатия.
Набегающий воздушный поток испытывает серию скачков уплотнения у носовой части самолета и на входе в воздухозаборник, его скорость снижается, при этом растут давление и температура. Принципиально важным компонентом ГПВРД выступает задняя часть воздухозаборника. В этой зоне сверхзвуковой входящий поток встречается с противодавлением, которое превосходит статическое давление воздуха на входе. Когда в результате процесса горения от стенки начинает отделяться пограничный слой, в зоне задней части воздухозаборника формируется серия скачков уплотнения, создавая своего рода «предкамеру» перед настоящей камерой сгорания. Наличие задней части воздухозаборника позволяет достичь в камере сгорания необходимых уровней теплоподвода и управлять растущим давлением так, чтобы не возникла ситуация, называемая «запиранием», при которой ударные волны препятствуют попаданию воздушного потока в заднюю часть воздухозаборника.
Камера сгорания обеспечивает наиболее эффективное смешивание воздуха с горючим за счет впрыска, распределенного по длине камеры. Таким образом достигается наиболее эффективный перевод тепловой энергии в тягу двигателя. Система выброса газов, состоящая из сопла и нижней поверхности хвостовой части фюзеляжа, обеспечивает управляемое расширение сжатых горячих газов, что, собственно, и дает необходимую тягу. Процесс расширения преобразует возникающую в камере сгорания потенциальную энергию в энергию кинетическую. В зоне сопла происходит множество физических явлений — это и горение, и эффекты пограничного слоя, и нестационарные потоки газов, и неустойчивость слоев с поперечным сдвигом, а также множество специфических объемных эффектов. Форма сопла имеет огромное значение для эффективности работы двигателя и для полета в целом, поскольку она влияет на подъемную силу и управляемость самолета.
Ядерные гиперзвуковые ПВРД
Особую подгруппу ГПВРД предстявляют ядерные ГПВРД. Как и любой ядерный реактивный двигатель, ядерный ГПВРД вместо камеры сгорания оснащён камерой разогрева рабочего тела. Также, в отличие от химических ГПВРД, ядерные ГПВРД используют в качестве рабочего тела только атмосферный воздух. Следовательно, в принципе самолёт с ядерным ГПВРД вовсе не нуждается в бортовых запасах рабочего тела. Но, как и неядерный ГПВРД, ядерный ГПВРД не может работать на скоростях ниже нижнего предела (около 4—5М).
Однако возможно создание трёхрежимной гиперзвуковой ядерной двигательной установки (ЯДУ). На скоростях значительно ниже нижнего предела (а тем более на нулевых) такая ЯДУ работает в «ракетном режиме», используя бортовые запасы рабочего тела.
На скоростях, значительно превышающих взлётно-посадочные, но недостаточных для работы в режиме ГПВРД, такая ЯДУ работает в «смешанном режиме», частично используя атмосферный воздух, частично — бортовой запас рабочего тела, причём пропорция в данном случае зависит от полётной скорости: чем выше скорость, тем больше доля атмосферного воздуха в рабочем теле и тем меньше в двигатель подаётся рабочего тела из бортовых запасов.
Наконец, на скоростях не ниже 5М ЯДУ работает в режиме ГПВРД, используя только атмосферный воздух. Естественно, «ракетный режим» и «смешанный режим» используется только в качестве взлётно-посадочных и для разгона до минимальной крейсерской скорости (в данном случае около 5М), тогда как в качестве крейсерского, естественно, используется режим ГПВРД. (Ядерный воздушно-космический самолёт использует «ракетный режим» в качестве крейсерского только вне атмосферы.)
Как следствие, отпадает необходимость в оснащении ядерного гиперзвукового самолёта дополнительной разгонной ДУ. С другой стороны, эффективный бортовой запас рабочего тела для маршевой ЯДУ при той же ёмкости баков получается вдвое большим, чем в случае с химической маршевой ДУ. Также в качестве малых маневровых двигателей (в том числе в качестве двигателей ориентации) на воздушно-космических самолётах можно применить электрические ракетные двигатели, использующие то же рабочее тело, что и маршевая ЯДУ. То есть возможно создание бортовой объединённой ДУ (ОДУ).
В результате ядерный гиперзвуковой самолёт получается сравнительно простым конструктивно и технологичным и, даже несмотря на сравнительно большую массу маршевой ЯДУ, более лёгким, чем неядерный аналог. Также ЯДУ и электрические ракетные двигатели потенциально имеют на порядок больший эксплуатационный ресурс, чем химические реактивные двигатели (в том числе ракетные и ГПВРД).
Таким образом, создание гиперзвукового или воздушно-космического ядерного самолёта теоретически может оказаться более простой конструкторской задачей, чем создание неядерного аналога, и вместе с тем обойтись сравнительно недорого (самая сложная и дорогостоящая подзадача — создание приемлемой маршевой гиперзвуковой ЯДУ). Также гиперзвуковой или воздушно-космический ядерный самолёт может получиться более простым и дешёвым в эксплуатации, чем неядерный аналог. Проблемы безопасности эксплуатации такого самолёта (безопасности полётов, безопасности утилизации отработанного ядерного топлива и выработавших ресурс маршевых ЯДУ) также вполне решаемы[источник не указан 307 дней].
Классы реактивных двигателей:
Все реактивные двигатели подразделяют на 2 класса:
- Воздушно-реактивные – тепловые двигатели, использующие энергию окисления воздуха, получаемого из атмосферы. В этих двигателях рабочее тело представлено смесью продуктов горения с остальными элементами отобранного воздуха.
- Ракетные – двигатели, которые на борту содержат все необходимые компоненты и способны работать даже в безвоздушном пространстве.
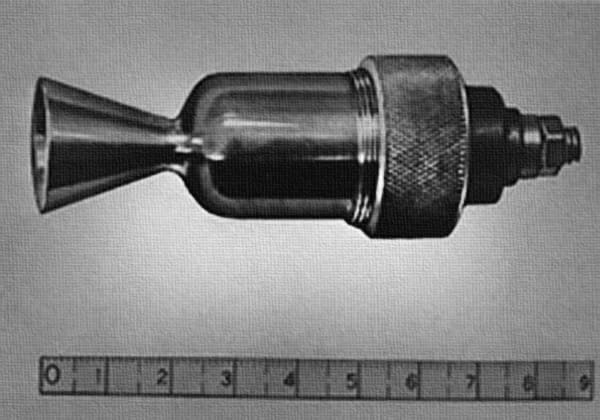
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.
Рабочий процесс ПВРД можно кратко описать следующим образом:
Во входное устройство двигателя поступает воздух со скоростью полета, кинетическая его энергия преобразуется во внутреннюю, давление и температура воздуха повышаются. На входе в камеру сгорания и по всей длине проточной части наблюдается максимальное давление.
- Нагревание сжатого воздуха в камере сгорания происходит путем окисления подаваемого воздуха, при этом внутренняя энергия рабочего тела увеличивается.
- Далее поток сужается в сопле, рабочее тело достигает звуковой скорости, а вновь при расширении – сверхзвуковой. За счет того, что рабочее тело движется со скоростью, превышающей скорость встречного потока, внутри создается реактивная тяга.
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».
Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
- Чем больше показатель скорости полета, тем большим будет расход воздуха, проходящего через тракт двигателя, соответственно, большее количество кислорода будет проникать в камеру сгорания, что увеличивает расход топлива, тепловую и механическую мощность мотора.
- Чем больше расход воздуха сквозь тракт двигателя, тем выше будет создаваемая мотором тяга. Однако существует некий предел, расход воздуха сквозь тракт мотора не может увеличиваться неограниченно.
- При возрастании скорости полета увеличивается уровень давления в камере сгорания. Вследствие этого увеличивается термический КПД двигателя.
- Чем больше разница между скоростью полета аппарата и скоростью прохождения реактивной струи, тем больше тяга двигателя.
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:
- дозвуковые;
- сверхзвуковые;
- гиперзвуковые.
Каждая из групп имеет свои отличительные особенности конструкции.