«важнейшее звено в системе разведки»: какими возможностями обладает новейшая радиолокационная станция «контейнер»
Содержание:
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.
В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;
- непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
https://youtube.com/watch?v=EzWo_k1MDuc
Импульсные РЛС имеют как недостатки, так и преимущества. Они могут определять дальность сразу нескольких целей, подобный радар вполне может обходиться одной антенной, индикаторы подобных устройств отличаются простотой. Однако при этом сигнал, испускаемый подобным РЛС должен иметь довольно большую мощность. Также можно добавить, что все современные радары сопровождения выполнены по импульсной схеме.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, причем они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно, РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.
Основной проблемой радаров непрерывного действия является невозможность с их помощью определять расстояние до объекта, зато при их работе не возникает помех от неподвижных предметов между РЛС и целью или за ней. Кроме того, доплеровские радары – это довольно простые устройства, которым для работы достаточно сигналов малой мощности. Также нужно отметить, что современные радиолокационные станции с непрерывным излучением имеют возможность определять расстояние до объекта. Для этого используется изменение частоты РЛС во время работы.
Одной из главных проблем в работе импульсных РЛС являются помехи, которые идут от неподвижных объектов — как правило, это земная поверхность, горы, холмы. При работе бортовых импульсных радаров самолетов все объекты, находящиеся ниже, «затеняются» сигналом, отраженным от земной поверхности. Если говорить о наземных или судовых радиолокационных комплексах, то для них эта проблема проявляется в обнаружении целей, летящих на малых высотах. Чтобы устранить подобные помехи используется все тот же эффект Доплера.
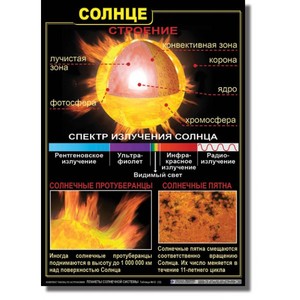
Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
Работа — радиолокатор
|
Характер посылки сигналов импульсной станцией. |
Работа радиолокаторов на СВЧ и в импульсном режиме предъявляет особые требования к электронным лампам и другим элементам передающей и принимающей частей станции.
Работу радиолокатора в целом можно проконтролировать с помощью резонатора-с большим коэффициентом Q, слабо связанного с аппаратурой радиолокатора, либо через направленный от-ветвитель, расположенный в главном тракте, либо с помощью небольшой антенны-зонда, расположенной в луче антенны. Импульс передатчика возбуждает в резонаторе колебания, которые принимаются приемником в виде экспоненциально затухающего, сигнала и затем фиксируются на индикаторе. Такие резонаторы, называемые эхо-камерами , представляют собой круглый цилиндрический резонатор с волной TE0i высшего вида или большой параллелепипед с такими формой и размерами, при которых частота по крайней мере одного вида волны находится в пределах спектра излучаемого импульса и полосы приемника.
При работе радиолокатора наблюдаемый объем пространства делится на малые элементы, размеры которых зависят от ширины диаграммы направленности и разрешающей способности по дальности. Невозможно с абсолютной достоверностью утверждать, что любой импульс на индикаторе вызван не выбросом шумов, а полезным сигналом. Для анализа приемник можно рассматривать состоящим из двух частей: во-первых, из цепей, чувствительных к относительной фазе сигнала, и, во-вторых, из цепей, где приходится иметь дело с сигналом после детектирования.
|
Значение N а Ю2 для дождя иа разных частотах. |
При работе радиолокатора непрерывного излучения с общей антенной для передачи и приема в пространстве, целиком заполненном дождем, отраженные сигналы приходят со всех расстояний одновременно; наибольшие сигналы отражаются дождем, выпадающим в ближней части релеевской дальности, где излучаемое поле является интенсивным, а дальность — мала.
Задача анализа качества работы радиолокатора каждого данного вида сводится при этом к исследованию случайных процессов в нем при воздействии на вход приемника случайного сигнала, смешанного с шумами или помехами.
В действительности при работе радиолокатора имеется весьма сложная картина на электроннолучевой трубке ( индикаторе), так как принятый сигнал состоит из большого числа импульсов, в том числе случайных импульсов ( помех), и оператору бывает очень трудно выделить полезный сигнал, соответствующий отражению от цели.
На каких принципах основана работа радиолокатора.
Кроме того, большая ширина луча в вертикальной плоскости улучшает работу радиолокатора во время качки.
Такие отражатели используются также в качестве искусственных целей при работе радиолокатора. В последнее время в качестве таких искусственных целей стали применяться двухмерные решетки из диполей , соединенных между собой таким образом, что отражение в обратном направлении имеет место при любом угле падения от нормального до касательного.
Используя ультразвуковую линию задержки, удается, таким образом, существенно повысить четкость работы радиолокатора и повысить, как принято выражаться, его помехоустойчивость.
|
Функциональная схема многоканальной системы. |
Весьма радикальным средством сокращения числа частотных каналов является изменение закона модуляции в процессе работы радиолокатора. Этот способ пригоден, no — видимюму, только для радиолокаторов специального назначения, IB задачи Которых не входит непрерывное наблюдение за вновь появляющимися целями.
В О бщем, ни одна из сравниваемых систем ЧПК не обладает решающими преимуществами, ( поэтому каждая из них используется в зависимости от конкретных условий работы данного радиолокатора.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
В чем разница между первичным и вторичным радиолокаторами?
Сравнительная характеристика первичного
Основной особенностью первичных радиолокационных устройств является то,
что они работают с пассивным эхо-сигналом.
Излученные высокочастотные импульсы отражаются целью и затем принимаются тем же
радиолокационным устройством.
Таким образом, непосредственной причиной возникновения отраженного эхо-сигнала является зондирующий сигнал,
излучаемый радиолокационным устройством.
и вторичного радиолокаторов
Вторичные радиолокационные устройства работают по
иному принципу:
они используют активные ответные сигналы.
Вторичное радиолокационное устройство также излучает зондирующий сигнал, называемый запросным.
Когда этот сигнал достигает цели, он принимается бортовым
активным ответчиком,
в котором выполняется его обработка.
После этого формируется и излучается ответный сигнал на другой частоте, содержащий
ответное сообщение.
Системы обоих типов, в силу различия принципов построения, имеют свои достоинства и недостатки.
Так, первичный радиолокатор обеспечивает достоверную информацию об угловых координатах, высоте и дальности цели.
В то же время вторичный радиолокатор может получать дополнительную информацию, такую как, например,
сигналы опознавания государственной принадлежности и
высота.
Последнее является весьма полезным свойством, поскольку точность измерения высоты бортовыми высотомерами выше,
чем точность наземных высотомеров.
Следует помнить, что вторичная радиолокация требует наличия на борту специального оборудования.
Однако именно благодаря этому появляется возможность существенно уменьшить мощность передатчика при
сохранении такого же значения максимальной дальности действия, что и в случае первичной радиолокации
Это легко поясняется тем, что излучаемая мощность входит в
уравнение радиолокации
совместно с удвоенной дальностью до цели в случае первичной радиолокации и однократной дальностью — в случае вторичной радиолокации:
Рисунок 1. Калибровочные кривые приемников, различные чувствительности первичного (PSR) и вторичного (SSR) радиолокационных приемников
Рисунок 1. Калибровочные кривые приемников, различные чувствительности первичного (PSR) и вторичного (SSR) радиолокационных приемников
В качестве оценочного значения можно принять снижение мощности передатчика в 1000 раз.
Это означает, что в таком случае может быть использован более простой, компактный и дешевый передатчик.
Приемник может обладать худшей чувствительностью, поскольку мощность сигналов активного ответа больше мощности пассивного эхо-сигнала.
Однако по этой же причине возрастает негативное влияние сигналов, принятых по
боковым лепесткам.
По этой причине при построении вторичных радиолокаторов, как правило,
предпринимаются дополнительные меры по
подавлению боковых лепестков.
Поскольку излучение и прием происходит на отличающихся друг от друга частотах, пассивные помехи не возникают,
следовательно отпадает необходимость в системе селекции движущихся целей.
С другой стороны, при подавлении активными помехами изменение частоты невозможно.
Специфические помехи,
имеющие место при использовании вторичных радиолокационных устройств вызывают необходимость дополнительных схемных решений.
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
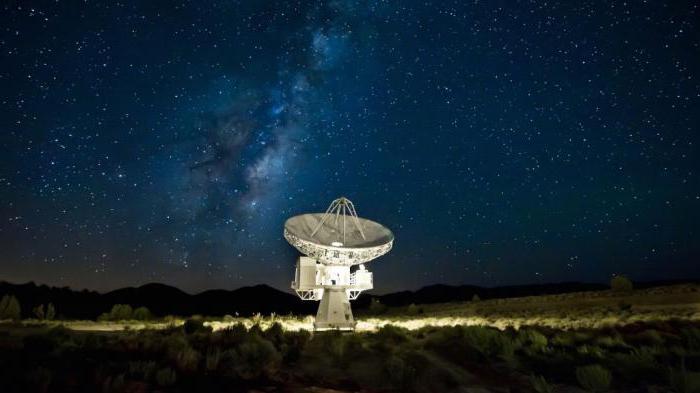
Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии — изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.
Литература
- Erickson, John; «Radiolocation and the air defense problem: The design and development of Soviet Radar 1934-40», Social Studies of Science, vol. 2, pp. 241—263, 1972
- Ширман Я. Д., Голиков В. Н., Бусыгин И. Н., Костин Г. А. Теоретические основы радиолокации / Ширман Я. Д.. — М.: Советское радио, 1970. — 559 с.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Бакут П. А., Большаков И. А., Герасимов Б. М., Курикша А. А., Репин В. Г., Тартаковский Г. П., Широков В. В. Вопросы статистической теории радиолокации. — М.: Советское радио, 1963. — 423 с.
- Центральная радиолаборатория в Ленинграде // Под ред. И. В. Бренёва. — М.: Советское радио, 1973.
- Военно-исторический музей артиллерии, инженерных войск и войск связи. Коллекция документов генерал-лейтенанта М. М. Лобанова по истории развития радиолокационной техники. Ф. 52Р оп. № 13
- Лобанов М. М. Из прошлого радиолокации: Краткий очерк. — М.: Воениздат, 1969. — 212 с. — 6500 экз.
- Лобанов М. М. Мы —— военные инженеры. — М.: Воениздат, 1977. — 223 с.
Лобанов М. М. Развитие советской радиолокационной техники. — М.: Воениздат, 1982. — 240 с. — 22 000 экз.
Сиверс А. П., Суслов Н. А., Метельский В. И. Основы радиолокации. — Л.: СудпромГиз, 1959. — 350 с. — (Учебное пособие для радиотехнических специальностей высших учебных заведений). — 25 500 экз.
2.1 Расчет максимальной дальности действия с учётом поглощения
Сначала рассчитывается максимальная дальность действия РЛС без учёта ослабления энергии радиоволн при распространении. Расчет проводится по формуле:
(1)
Подсчитаем и установим величины, входящие в это выражение:
Еизл=Рии=6001032,210-6=1,32
Sа=dагdав=72,5=8,75 [м2
kр=kр.т.
kр.т.=
101,2
0,51
= 14,4 [град/с]
Подставляя полученные значения, будем иметь:
tобл= 0,036 , N = 25 импульсов и kр.т.= 2,02.
Пусть =10, тогда kP=20.
Еш — энергия шумов, действующих при приёме:
Eш=kkшT =1,3810-235300=2,0710-20
Подставляя все полученные значения в (1), находим 634,38
Теперь определим максимальную дальность действия РЛС с учетом поглощения энергии радиоволн:
(2)
Значение осл находим по графикам. Для =6 см осл принимаем равным 0,01 дБ/км. Предположим, что ослабление происходит на всей дальности действия. При таком условии формула (2) принимает вид трансцендентного уравнения
(3)
Уравнение (3) решим графоаналитическим способом. Для осл = 0,01 дБ/км и Dмакс= 634,38 км рассчитываем Dмакс.осл = 305,9 км.
Вывод: Из полученных расчетов видно, что максимальная дальность действия РЛС с учетом ослабления энергии радиоволн при распространении равна Dмакс.осл= 305,9 .